英文
英文 中文
中文 东莞市霍尔森科技有限公司
东莞市霍尔森科技有限公司
在现代城市中,高楼大厦林立,许多建筑的外墙都是由大面积的玻璃幕墙构成,这就给窗户清洁带来了很大的挑战。传统的清洁方法不仅费时费力,而且存在一定的安全隐患。于是,擦窗机器人的出现为窗户清洁带来了全新的解决方案。

擦窗机器人的原理首先是依托于其搭载的霍尔传感器系统。它主要控制擦窗机器人的启动和停止。还可以感知窗户的大小、形状、倾斜的角度等参数,从而为机器人提供清洁路径规划和动作控制的基础数据。通过对窗户表面的实时感知,擦窗机器人可以进准地识别出需要清洁的区域,避开窗户边框和其他障碍物。确保清洁作业的高效进行。
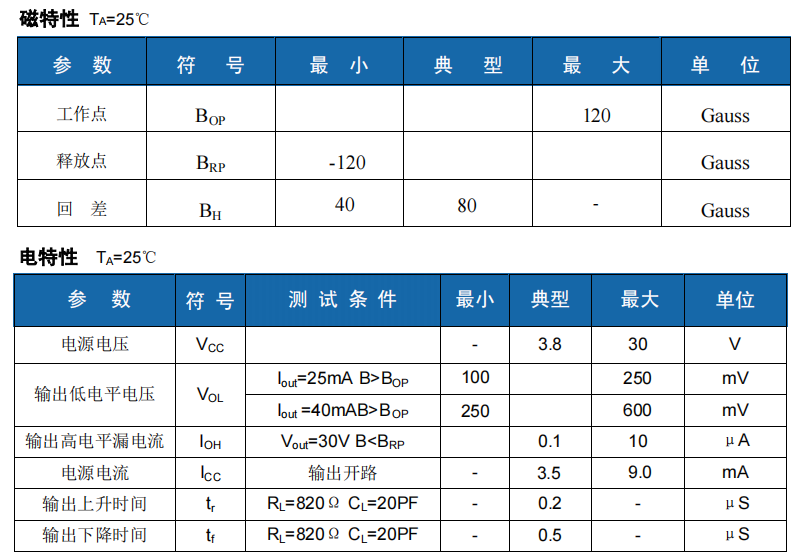
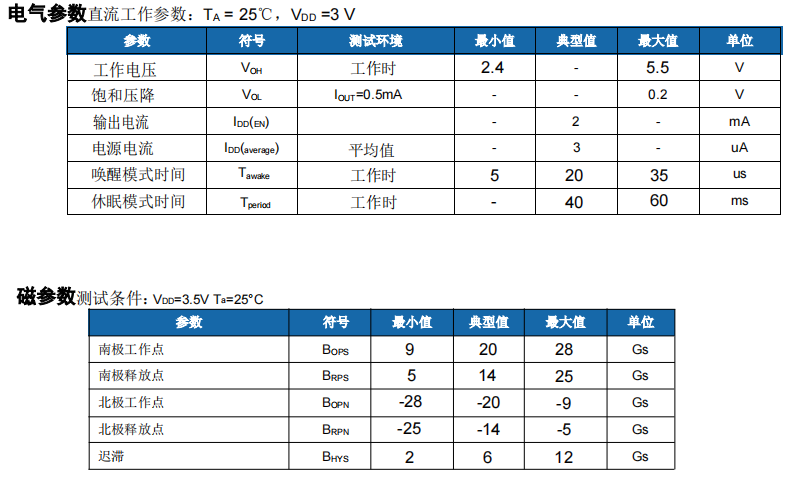
推荐型号:HS479全极霍尔元件主要控制擦窗机器人的启动和停止,和HS41F双极锁存型霍尔开关主要检测无刷电机转子位置反馈给控制电路,使其能够感知电机相位换向的准确时间。
HS479的特点:
1.微功耗电池供电应用
2.全极性的输出开关
3.工作电压可低至2.4V
4.高灵敏度直接簧片开关的替代应用
5.CMOS输出
其次,擦窗机器人的原理还包括智能控制系统的应用。霍尔开关主要检测无刷电机转子位置反馈给控制电路,使其能够感知电机相位换向的准确时间。智能控制系统会根据预先设定的清洁路线和策略,对机器人下达精准的指令控制,使其能够沿着窗户表面进行规律的清洁运动。同时,智能控制系统还可以根据窗户的实际状况进行动态调整,确保清洁作业的全面覆盖和清洁效果的最大化。
HS41F的特点:
1.电源电压范围宽,输出电流大。
2.开关速度快,无瞬间抖动。
3.工作频率宽(0~100KHz)。
4.寿命长、体积小、安装方便。
5.能直接和逻辑电路接口。